
UAV搭載型レーザースキャナについて
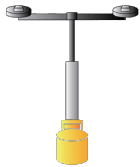
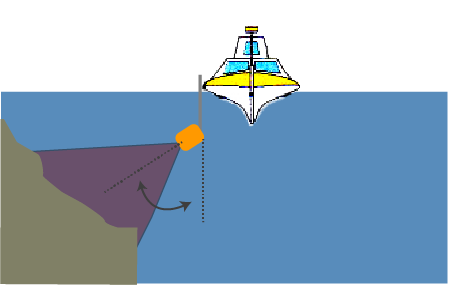
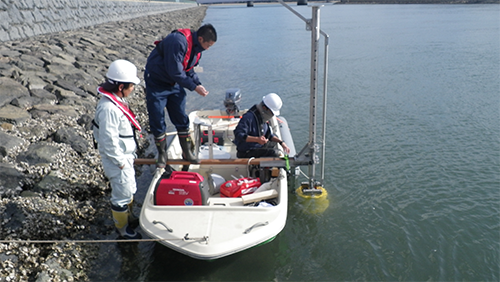
ソナー本体は専用架台によりGNSS と一体化されています。移動局として2台のGNSS とソナー動揺データにより精密にソナー底面のグローバル座標を取得します。ソナーの測深データは測深時刻とソナー底面を原点としたXYZ 座標を記録します。計測時はGNSS の単独測位データを利用してナビゲーションおよび計測範囲などの表示をおこないます。計測終了後、GNSS の測位データをキネマ解析し、精密な位置情報で測深データをグローバル座標へ変換します。ソナー測深データとGNSS 測位データは時刻を使い同期を取っています。